Josh Blatt

My name is Josh Blatt and I am a 3B Mechatronics Engineering student at the University of Waterloo. I have strong interests in the areas of blockchain / decentralized technologies, embedded systems, robotics, controls, artificial intelligence, and software design. I was born in New York City and moved to Toronto at the age of 3. Some of my interests include rock climbing, speed solving Rubik's cubes, spending time with friends, and board games.
My favourite quote is "If you are going to do something amazing, you are by definition unqualified to do it" - James D. Watson.
You can contact me by email at: jablatt@uwaterloo.ca :)

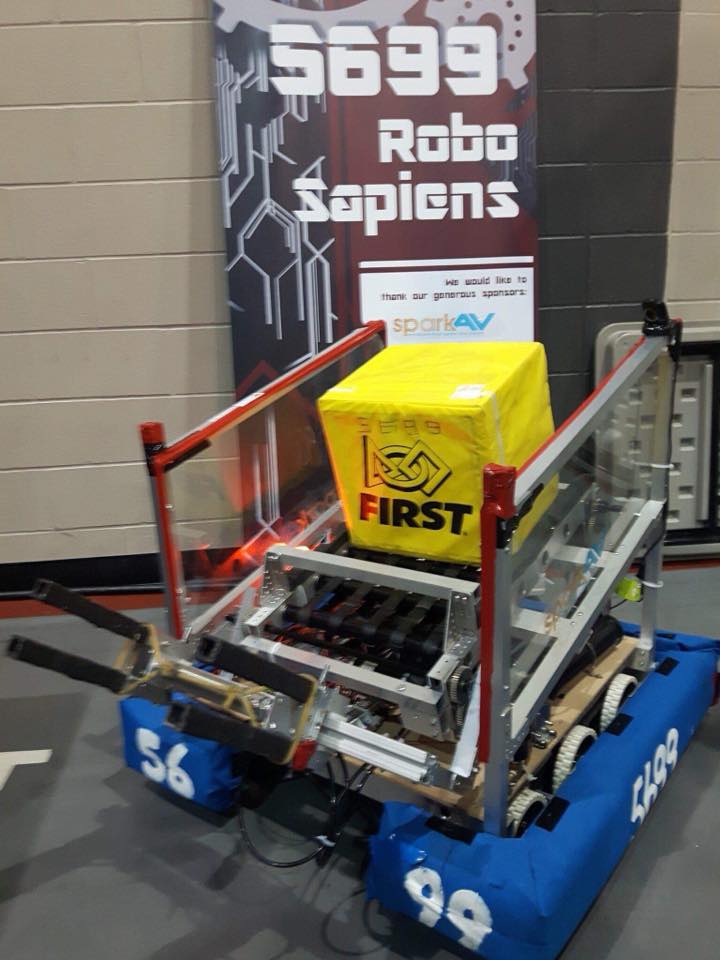
In the FIRST Robotics competition, students are given a short 6 weeks to build a robot used in the annual competition. My time on this team exposed me to many engineering concepts and taught me many skills. I learned a lot about motors and gears, electrical circuits, programming hardware, pneumatic systems, and working with others on an engineering project. One of my major responsibilities was programming the driver controls and autonomous code for the robot using Java. In my final year of high school, I led the team and really learned how much is involved in managing an engineering team.
For my final project in MTE 100 (Mechatronics Engineering Concepts) and GENE 121 (Digital Computation), my group built a Skittle Sorter using the Lego Mindstorms EV3 kit. The kit made the acutal construction of the system pretty simple, but the whole design process was still present in this project. My individual contributions were in the code for movement of the conveyor belt and the physical construction and programming of the rotating platform. If I was given more time, I would have figured out a more permanent way to mount everything together.
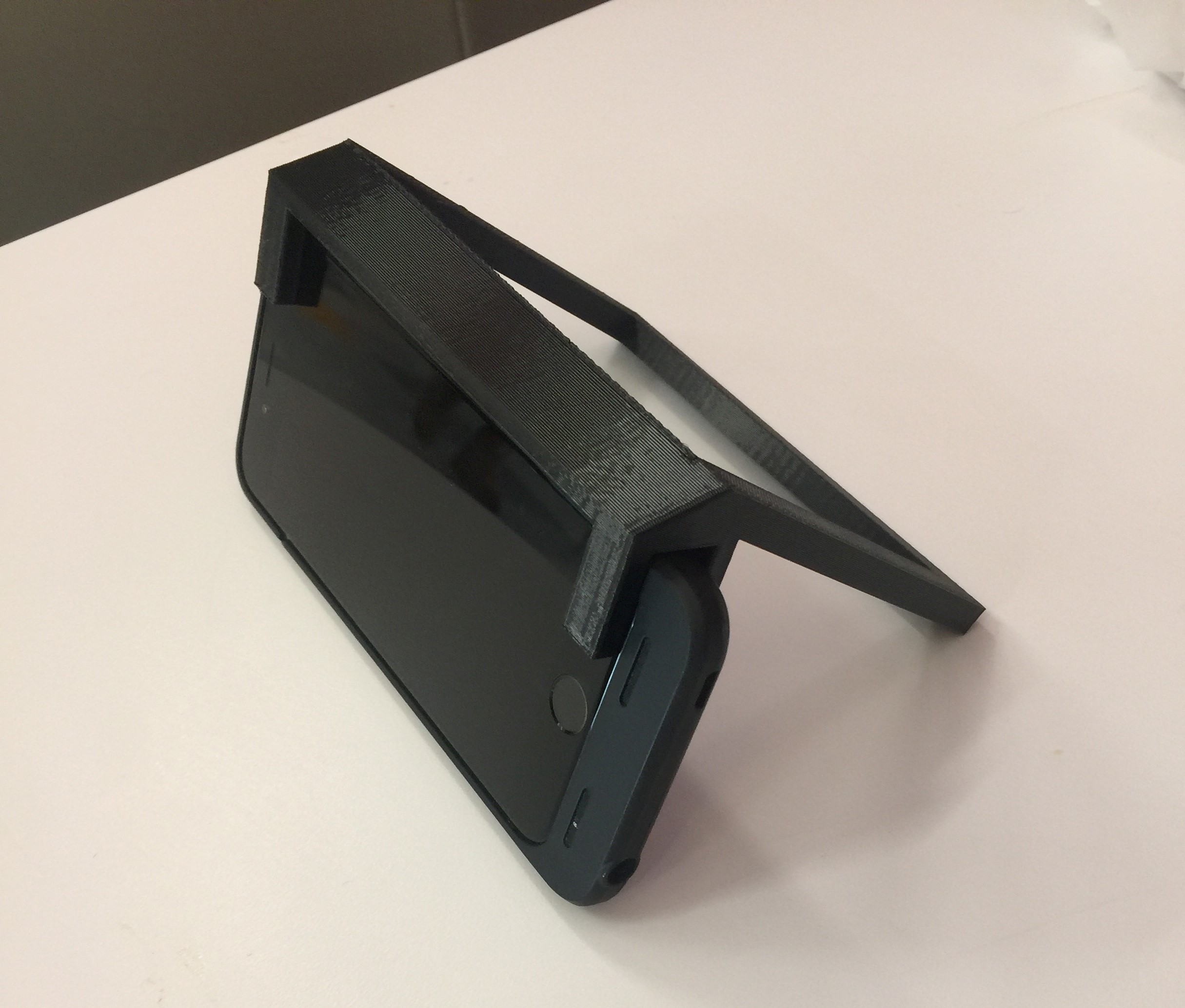
For my EGAD (Engineering Graphics and Design) class, the last project we had was to design and 3D-print a phone stand given very specific requirements. We were only allowed to use 2.5 cubic inches of material, with a maximum of 0.25 cubic inches of this being support material. The stand had to hold the phone at a 65-70 degree angle. This made designing this rather difficult, but regardless I ended up with a very unique and interesting design that was tailored to my phone specifically. It holds the phone horizonatally by clamping the two ends together and relies on the friction of my phone case. If I were to do this again, I would aim to make a design that works with a larger variety of phones, but I am still very pleased with the result.
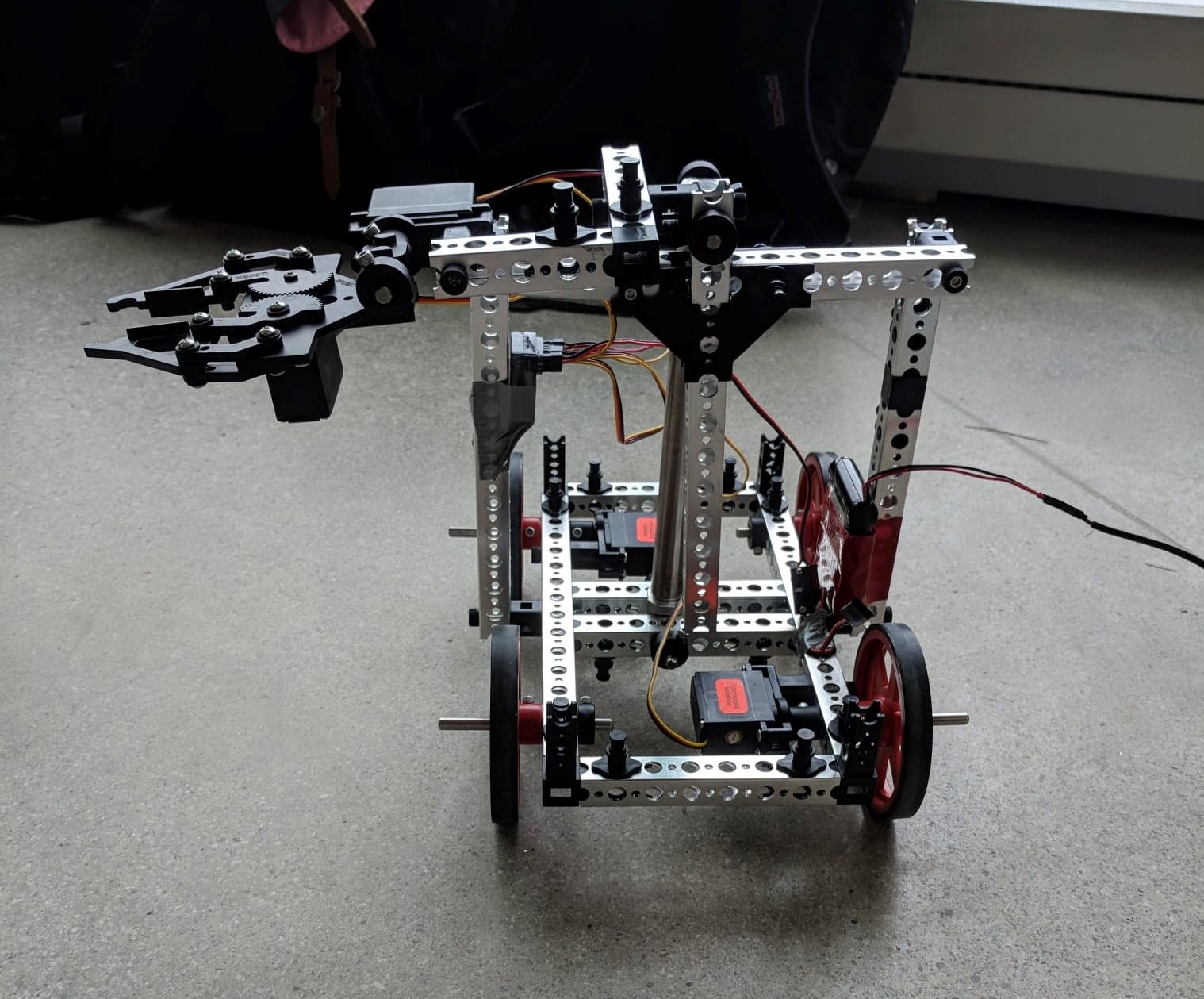
During the Tron Day, students are given a TETRIX kit and needed to make a robot able to lift and place small plastic bones onto ramps over the course of 2 days. The first day was for designing and sketching out the robot, and the second was for building it and testing it. The design also was not allowed to use more than 4 motors (2 with continous, 2 with 180 degrees of rotation) and had to use a pneumatic cylinder. We opted for a simple design that lifted the arm with a pneumatic cylinder and has a motor attached to the claw to allow for greater accuracy. The robot could also move side to side using the wheels. The robot was able to score full points, but not complete all the bonus challenges.
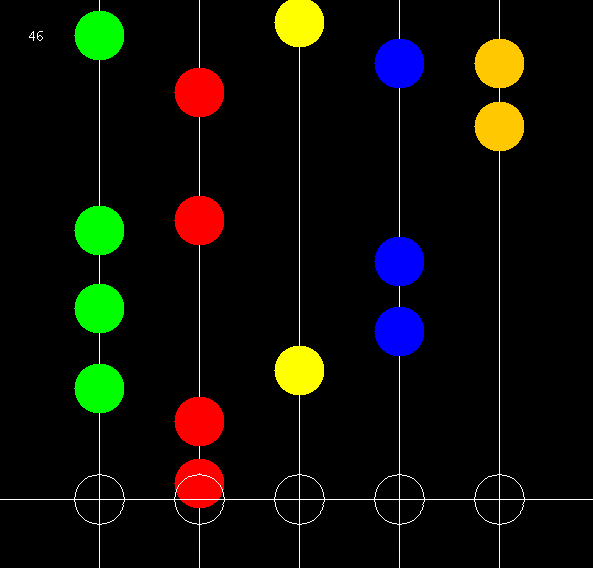
For my ICS 4U (Grade 12 Computer Science) class culminating, I created Guitar Hero using Java and JFrames. This was the first larger scale project that implemented object-oriented programming design. It is not perfect, but it was a great project and I grew a lot as a programmer from it. I will admit, graphics are not exactly my strong suite so visually it is not the greatest, but the functionality is there. You can see the code on my GitHub linked above.
These solves were recorded about 3 months apart. Improvement takes time, but nothing is more satisfying than seeing your hard work pay off.